ロボット関連装置

<ロボットシステム 納入事例 : 生産加工>
●ロボット関連装置 (納入実績1) スポット溶接ロボット
●ロボット関連装置 (納入実績2) シーリングロボット
●ロボット関連装置 (納入実績3) ロールヘム用ロボット
●ロボット関連装置 (納入実績4) レーサトリムロボット
●ロボット関連装置 (納入実績5) アーク溶接ロボット
●ロボット関連装置 (納入実績6) アーク溶接ロボット
●ロボット関連装置 (納入実績7) 多種対応ヘムライン
●ロボット関連装置 (納入実績8) シーリング
●ロボット関連装置 (納入実績9) レーザ穴あけ
●ロボット関連装置 (納入実績10) セル電極レーザカット
●ロボット関連装置 (納入実績11) セル部品熱カシメ・超音波接合
●ロボット関連装置 (納入実績12) セル・バスバー超音波接合
<ロボットシステム 納入事例 : マテハン・ハンドリング>
●ロボット関連装置 (納入実績13) ハンドリングロボット
●ロボット関連装置 (納入実績14) パネル自動投入
●ロボット関連装置 (納入実績15) セル・ハンドリング
●ロボット関連装置 (納入実績16) セル部品ストレージ取り出し
●ロボット関連装置 (納入実績17) セル・モールディング
●ロボット関連装置 (納入実績18) LWR CASEのセット
●ロボット関連装置 (納入実績19) 積層セル・セット
●ロボット関連装置 (納入実績20) UPR CASEの搬送・セット
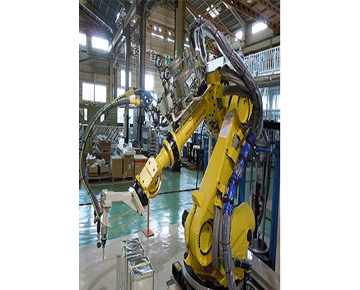
ロボット関連装置 (納入実績1) スポット溶接ロボット
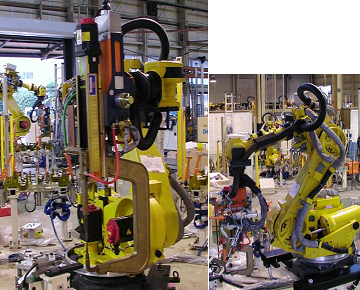
| 機能 | スポット溶接Cガン、Xガン例。 165Kgf、210Kgf可搬ロボット 加圧はサーボモータ、冷却水+シャットオフバルブ機能を備える。 (可搬重量 210Kgf) |
|---|---|
| 顧客のニーズ | シミュレーションによる設備成立性検討、オフラインティーチによるプログラムの事前準備が行われる。 |
| 今後の動向 | トランスを軽量化したインバータGUN採用が進む。ロボット自体がスリムで軽量高速化させる傾向。溶接品質向上のため、溶接中のF/B機能を設ける取り組みがある。 ハンドチェンジ機能を持たせたロボットもある |
ロボット関連装置 (納入実績2) シーリングロボット

| 機能 | 高速でも一定量の塗布量を確保する定量塗布シーリングシステムを採用した例。 |
|---|---|
| 顧客のニーズ | シミュレーションによる設備成立性検討、オフラインティーチによるプログラムの事前準備が行われる。 |
| 今後の動向 | ハンドと組み合わせることにより、ロボット台数を減らすこともある。 |
ロボット関連装置 (納入実績3) ロールヘム用ロボット

| 機能 | DOOR、HOODなどの人の手がかかる部分のエッジ部を折り曲げる装置であるROLL HEM方式を採用した例。 下型にセットしたパネルのエッジをローラーで折り曲げる。 (可搬重量 210Kgf) |
|---|---|
| 顧客のニーズ | シミュレーションによる設備成立性検討、オフラインティーチによるプログラムの事前準備が行われる。 |
| 今後の動向 | 装置システムとして安価なロールへム方式が拡大しつつある。ロボットティーチが品質にかかわるため途上国では採用が少なかったが、近年採用を拡大する傾向がある。 事前トライにより品質確保してから搬出、現地で再現する方法が取られる。 |
ロボット関連装置 (納入実績4) レーサトリムロボット

| 機能 | YAGレーザによる樹脂部品のトリム、穴あけに使用する。共用の部品から輸出先、車種、グレードによる穴有無、トリム形状違いを作り出す。
(可搬重量 120Kgf) |
|---|---|
| 顧客のニーズ | シミュレーションによる設備成立性検討、オフラインティーチによるプログラムの事前準備が行われる。 |
| 今後の動向 | 装置システムとして安価なロールへム方式が拡大しつつある。ロボットティーチが品質にかかわるため途上国では採用が少なかったが、近年採用を拡大する傾向がある。 |
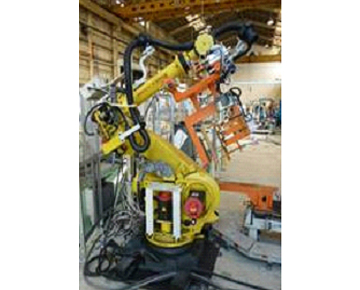
ロボット関連装置 (納入実績5) アーク溶接ロボット
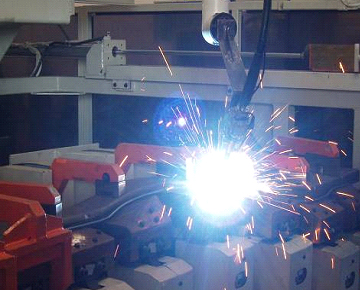
| 機能 | トラックフレームのアーク溶接
(可搬重量 50Kgf) |
|---|---|
| 顧客のニーズ | シミュレーションによる設備成立性検討、オフラインティーチによるプログラムの事前準備が行われる。 |
| 今後の動向 | 小型アーク溶接の特殊機能を持ったロボットを採用する。 |
ロボット関連装置 (納入実績6) アーク溶接ロボット

| 機能 | LBセルのハンドリング用
(可搬重量 10Kgf) |
|---|---|
| 顧客のニーズ | |
| 今後の動向 |
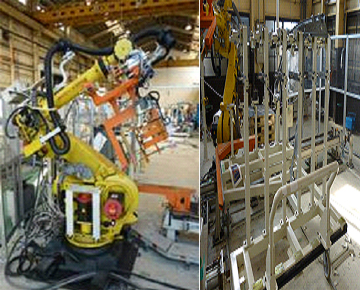
ロボット関連装置 (納入実績7) 多種対応ヘムライン
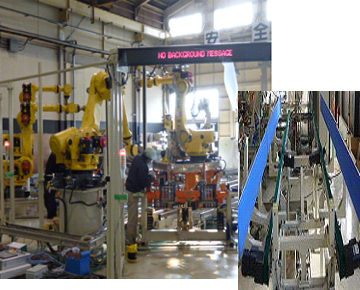
| 機能 | 多車種、異なるヘム方式でカバーを組み立てられるライン
(タクト:54秒) |
|---|---|
| 顧客のニーズ | 汎用Fixture設計、生産指示を含めた制御設計、ロボット立上げ調整まで一貫して依頼したい。 |
| 今後の動向 | 開発後はFixture(受けなど)の共用化がカギ。 |
ロボット関連装置 (納入実績8) シーリング
| 機能 | 定量塗布シーリング
(シリング速度:100MM/SEC) |
|---|---|
| 顧客のニーズ | 出荷前にロボット立上を実施する。 |
| 今後の動向 | 難度低 |
ロボット関連装置 (納入実績9) レーザ穴あけ

| 機能 | 車両内装樹脂部品の指向地による種々の穴あけ (タクト:120秒) |
|---|---|
| 顧客のニーズ | 種々の穴系を1工程で可能可能とする。ドリルで出るバリを出さずにカットしたい。 |
| 今後の動向 | 特徴が少なく、難度が高いのはティーチングのみ |
ロボット関連装置 (納入実績10) セル電極レーザカット

| 機能 | Φ・2.6mmピンにΦ3mm位置決め穴を持つ軟体ラミネート電池を入れる。 (タクト:7秒) |
|---|---|
| 顧客のニーズ | ラミネートの3mm穴を変形させることなくセルを部品にセットする必要がある。 |
| 今後の動向 | 日本において適切なメカ設計能力と視覚知識の両方必要な設備は継続する。 |
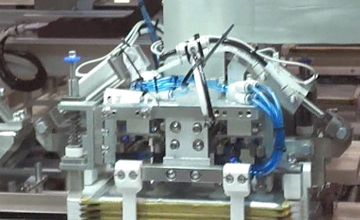
ロボット関連装置 (納入実績11) セル部品熱カシメ・超音波接合

| 機能 | 複数種のワークで接合位置が違う。かつ1ワークに複数接合ポイントあり。 次工程で検査あり。 (タクト:15秒) |
|---|---|
| 顧客のニーズ | 複数の接合ポイントの接合を行いたい。 |
| 採用経緯 | 超音波接合の経験あり |
| 今後の動向 | 難度低。何でも適用できる。 |
ロボット関連装置 (納入実績12) セル・バスバー超音波接合

| 機能 | 複数種のワークで接合位置が違う。かつ1ワークに複数接合ポイントあり。 |
|---|---|
| 顧客のニーズ | 複数の接合ポイントの接合を行いたい。 |
| 採用経緯 | 超音波接合の経験あり |
| 今後の動向 | 難度低。何でも適用できる。 |
ロボット関連装置 (納入実績13) ハンドリングロボット
| 機能 | 近似形状パネルであれば取り出し、セットが可能なハンドを持ったロボット (可搬重量 210Kgf) |
|---|---|
| 顧客のニーズ | シミュレーションによる設備成立性検討、オフラインティーチによるプログラムの事前準備が行われる。 |
| 今後の動向 | 多種少量生産に伴い一つのハンドで多数のワークを掴める汎用性の高いハンドを採用することが多くなっている。 ハンドチェンジ機能を持たせたロボットもある。 |
ロボット関連装置 (納入実績14) パネル自動投入
| 機能 | 5車種B/SIDE INR自動投入
(タクト:46秒) |
|---|---|
| 顧客のニーズ | ・部品投入、搬送作業者を削減したい ・多車種対応だがエリアが限られているので簡素な設備としたい。 ・生産中なので生産の無い日での工事のみ |
| 今後の動向 | 日本で製造業が生き残るため無人化は必須であり、継続して工場全域で計画がある。 |
ロボット関連装置 (納入実績15) セル・ハンドリング

| 機能 | Φ・2.6mmピンにΦ3mm位置決め穴を持つ軟体ラミネート電池を入れる。 (タクト:7秒) |
|---|---|
| 顧客のニーズ | ラミネートの3mm穴を変形させることなくセルを部品にセットする必要がある。 |
| 今後の動向 | 日本において適切なメカ設計能力と視覚知識の両方必要な設備は継続する。 |
ロボット関連装置 (納入実績16) セル部品ストレージ取り出し

| 機能 | お菓子を入れるような薄く、正確な位置決めが出来ないポリ容器に入れられた3D立体部品を正確な姿勢になるよう取り出してパレットにセットする。 (タクト:7秒) |
|---|---|
| 顧客のニーズ | 部品供給輸送側工数削減と本部品セット工数を最小限にしたい。 |
| 今後の動向 | ティーチング、視覚の組み合わせ及びラフな位置決めの部品のため難度の高い設備。 |
ロボット関連装置 (納入実績17) セル・モールディング

| 機能 | 複数種のワークで接合位置が違う。かつ1ワークに複数接合ポイントあり。 次工程で検査あり。 (タクト:15秒) |
|---|---|
| 顧客のニーズ | 複数の接合ポイントの接合を行いたい。 |
| 採用経緯 | 超音波接合の経験あり |
| 今後の動向 | 難度低。何でも適用できる。 |
ロボット関連装置 (納入実績18) LWR CASEのセット

| 機能 | CASEのセット |
|---|---|
| 顧客のニーズ | ・次プロセスで判別可能なこと ・集塵すること。 |
| 採用経緯 | |
| 今後の動向 |
ロボット関連装置 (納入実績19) 積層セル・セット
| 機能 | セル4積層のCASEへのセット |
|---|---|
| 顧客のニーズ | 搬送中のQRコードの認識 |
| 採用経緯 | |
| 今後の動向 |
ロボット関連装置 (納入実績20) UPR CASEの搬送・セット

| 機能 | CASEの搬送・セット |
|---|---|
| 顧客のニーズ | |
| 採用経緯 | |
| 今後の動向 |